
Heilbronn triangle problem


In discrete geometry and discrepancy theory, the Heilbronn triangle problem is a problem of placing points in the plane, avoiding triangles of small area. It is named after Hans Heilbronn, who conjectured that, no matter how points are placed in a given area, the smallest triangle area will be at most inversely proportional to the square of the number of points. His conjecture was proven false, but the asymptotic growth rate of the minimum triangle area remains unknown.
Definition
[edit]The Heilbronn triangle problem concerns the placement of points within a shape in the plane, such as the unit square or the unit disk, for a given number . Each triple of points form the three vertices of a triangle, and among these triangles, the problem concerns the smallest triangle, as measured by area. Different placements of points will have different smallest triangles, and the problem asks: how should points be placed to maximize the area of the smallest triangle?[1]
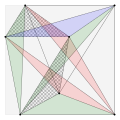
More formally, the shape may be assumed to be a compact set in the plane, meaning that it stays within a bounded distance from the origin and that points are allowed to be placed on its boundary. In most work on this problem, is additionally a convex set of nonzero area. When three of the placed points lie on a line, they are considered as forming a degenerate triangle whose area is defined to be zero, so placements that maximize the smallest triangle will not have collinear triples of points. The assumption that the shape is compact implies that there exists an optimal placement of points, rather than only a sequence of placements approaching optimality. The number may be defined as the area of the smallest triangle in this optimal placement.[1][a] An example is shown in the figure, with six points in a unit square. These six points form different triangles, four of which are shaded in the figure. Six of these 20 triangles, with two of the shaded shapes, have area 1/8; the remaining 14 triangles have larger areas. This is the optimal placement of six points in a unit square: all other placements form at least one triangle with area 1/8 or smaller. Therefore, .[2]




Although researchers have studied the value of for specific shapes and specific small numbers of points,[2][3][4] Heilbronn was concerned instead about its asymptotic behavior: if the shape is held fixed, but varies, how does the area of the smallest triangle vary with ? That is, Heilbronn's question concerns the growth rate of , as a function of . For any two shapes and , the numbers and differ only by a constant factor, as any placement of points within can be scaled by an affine transformation to fit within , changing the minimum triangle area only by a constant. Therefore, in bounds on the growth rate of that omit the constant of proportionality of that growth, the choice of is irrelevant and the subscript may be omitted.[1]


Heilbronn's conjecture and its disproof
[edit]Heilbronn conjectured prior to 1951 that the minimum triangle area always shrinks rapidly as a function of —more specifically, inversely proportional to the square of .[1][b] In terms of big O notation, this can be expressed as the bound



In the other direction, Paul Erdős found examples of point sets with minimum triangle area proportional to , demonstrating that, if true, Heilbronn's conjectured bound could not be strengthened. Erdős formulated the no-three-in-line problem, on large sets of grid points with no three in a line, to describe these examples. As Erdős observed, when is a prime number, the set of points on an integer grid (for ) have no three collinear points, and therefore by Pick's formula each of the triangles they form has area at least . When these grid points are scaled to fit within a unit square, their smallest triangle area is proportional to , matching Heilbronn's conjectured upper bound. If is not prime, then a similar construction using a prime number close to achieves the same asymptotic lower bound.[1][c]





Komlós, Pintz & Szemerédi (1982) eventually disproved Heilbronn's conjecture, by using the probabilistic method to find sets of points whose smallest triangle area is larger than the ones found by Erdős. Their construction involves the following steps:
- Randomly place points in the unit square, for some .
- Remove all pairs of points that are unexpectedly close together.
- Prove that there are few remaining low-area triangles and therefore only a sublinear number of cycles formed by two, three, or four low-area triangles. Remove all points belonging to these cycles.
- Apply a triangle removal lemma for 3-uniform hypergraphs of high girth to show that, with high probability, the remaining points include a subset of points that do not form any small-area triangles.


The area resulting from their construction grows asymptotically as[5] The proof can be derandomized, leading to a polynomial-time algorithm for constructing placements with this triangle area.[6]

Upper bounds
[edit]Every set of points in the unit square forms a triangle of area at most inversely proportional to . One way to see this is to triangulate the convex hull of the given point set , and choose the smallest of the triangles in the triangulation. Another is to sort the points by their -coordinates, and to choose the three consecutive points in this ordering whose -coordinates are the closest together. In the first paper published on the Heilbronn triangle problem, in 1951, Klaus Roth proved a stronger upper bound on , of the form[1] The best bound known to date is of the form for some constant , proven by Komlós, Pintz & Szemerédi (1981).[7]






A new upper bound equal to was proven by Cohen, Pohoata & Zakharov (2023).[8][9]

Specific shapes and numbers
[edit]Goldberg (1972) has investigated the optimal arrangements of points in a square, for up to 16.[2] Goldberg's constructions for up to six points lie on the boundary of the square, and are placed to form an affine transformation of the vertices of a regular polygon. For larger values of , Comellas & Yebra (2002) improved Goldberg's bounds, and for these values the solutions include points interior to the square.[3] These constructions have been proven optimal for up to seven points. The proof used a computer search to subdivide the configuration space of possible arrangements of the points into 226 different subproblems, and used nonlinear programming techniques to show that in 225 of those cases, the best arrangement was not as good as the known bound. In the remaining case, including the eventual optimal solution, its optimality was proven using symbolic computation techniques.[4]
The following are the best known solutions for 7–12 points in a unit square, found through simulated annealing;[3] the arrangement for seven points is known to be optimal.[4]
-
 7 points in a square, all 8 minimal triangles shaded ()
7 points in a square, all 8 minimal triangles shaded () -
![8 points in a square, 5 of 12 minimal triangles shaded[d] ('"`UNIQ--postMath-0000003B-QINU`"')](//upload.wikimedia.org/wikipedia/commons/thumb/0/09/Heilbronn_triangles%2C_8_points_in_square.svg/120px-Heilbronn_triangles%2C_8_points_in_square.svg.png) 8 points in a square, 5 of 12 minimal triangles shaded[d] ()
8 points in a square, 5 of 12 minimal triangles shaded[d] () -
![9 points in a square, 6 of 11 minimal triangles shaded[d] ('"`UNIQ--postMath-0000003C-QINU`"')](//upload.wikimedia.org/wikipedia/commons/thumb/6/61/Heilbronn_triangles%2C_9_points_in_square.svg/120px-Heilbronn_triangles%2C_9_points_in_square.svg.png) 9 points in a square, 6 of 11 minimal triangles shaded[d] ()
9 points in a square, 6 of 11 minimal triangles shaded[d] () -
![10 points in a square, 3 of 16 minimal triangles shaded[d] ('"`UNIQ--postMath-0000003D-QINU`"')](//upload.wikimedia.org/wikipedia/commons/thumb/b/b3/Heilbronn_triangles%2C_10_points_in_square.svg/120px-Heilbronn_triangles%2C_10_points_in_square.svg.png) 10 points in a square, 3 of 16 minimal triangles shaded[d] ()
10 points in a square, 3 of 16 minimal triangles shaded[d] () -
![11 points in a square, 8 of 28 minimal triangles shaded[d] ('"`UNIQ--postMath-0000003E-QINU`"')](//upload.wikimedia.org/wikipedia/commons/thumb/c/cd/Heilbronn_triangles%2C_11_points_in_square.svg/120px-Heilbronn_triangles%2C_11_points_in_square.svg.png) 11 points in a square, 8 of 28 minimal triangles shaded[d] ()
11 points in a square, 8 of 28 minimal triangles shaded[d] () -
![12 points in a square, 3 of 20 minimal triangles shaded[d] ('"`UNIQ--postMath-0000003F-QINU`"')](//upload.wikimedia.org/wikipedia/commons/thumb/8/8c/Heilbronn_triangles%2C_12_points_in_square.svg/120px-Heilbronn_triangles%2C_12_points_in_square.svg.png) 12 points in a square, 3 of 20 minimal triangles shaded[d] ()
12 points in a square, 3 of 20 minimal triangles shaded[d] ()


![8 points in a square, 5 of 12 minimal triangles shaded[d] ('"`UNIQ--postMath-0000003B-QINU`"')](/wiki/File:Heilbronn_triangles,_8_points_in_square.svg)

![9 points in a square, 6 of 11 minimal triangles shaded[d] ('"`UNIQ--postMath-0000003C-QINU`"')](/wiki/File:Heilbronn_triangles,_9_points_in_square.svg)

![10 points in a square, 3 of 16 minimal triangles shaded[d] ('"`UNIQ--postMath-0000003D-QINU`"')](/wiki/File:Heilbronn_triangles,_10_points_in_square.svg)

![11 points in a square, 8 of 28 minimal triangles shaded[d] ('"`UNIQ--postMath-0000003E-QINU`"')](/wiki/File:Heilbronn_triangles,_11_points_in_square.svg)

![12 points in a square, 3 of 20 minimal triangles shaded[d] ('"`UNIQ--postMath-0000003F-QINU`"')](/wiki/File:Heilbronn_triangles,_12_points_in_square.svg)

Instead of looking for optimal placements for a given shape, one may look for an optimal shape for a given number of points. Among convex shapes with area one, the regular hexagon is the one that maximizes ; for this shape, , with six points optimally placed at the hexagon vertices.[10] The convex shapes of unit area that maximize have .[11]




Variations
[edit]There have been many variations of this problem including the case of a uniformly random set of points, for which arguments based on either Kolmogorov complexity or Poisson approximation show that the expected value of the minimum area is inversely proportional to the cube of the number of points.[12][13] Variations involving the volume of higher-dimensional simplices have also been studied.[14][15][16]
Rather than considering simplices, another higher-dimensional version adds another parameter , and asks for placements of points in the unit hypercube that maximize the minimum volume of the convex hull of any subset of points. For these subsets form simplices but for larger values of , relative to , they can form more complicated shapes. When is sufficiently large relative to , randomly placed point sets have minimum -point convex hull volume . No better bound is possible; any placement has points with volume , obtained by choosing some consecutive points in coordinate order. This result has applications in range searching data structures.[17]






See also
[edit]- Danzer set, a set of points that avoids empty triangles of large area
Notes
[edit]- ^ Roth's definition uses slightly different notation, and normalizes the area of the triangle by dividing it by the area of .
- ^ The conjecture is credited to Heilbronn in Roth (1951), but without citation to any specific publication.
- ^ Erdős's construction was published in Roth (1951), credited to Erdős.
- ^ a b c d e Where several minimal-area triangles can be shown without calculation to be equal in area, only one of them is shaded.
References
[edit]- ^ a b c d e f Roth, K. F. (1951), "On a problem of Heilbronn", Journal of the London Mathematical Society, 26 (3): 198–204, doi:10.1112/jlms/s1-26.3.198
- ^ a b c Goldberg, Michael (1972), "Maximizing the smallest triangle made by points in a square", Mathematics Magazine, 45 (3): 135–144, doi:10.2307/2687869, JSTOR 2687869, MR 0296816
- ^ a b c Comellas, Francesc; Yebra, J. Luis A. (2002), "New lower bounds for Heilbronn numbers", Electronic Journal of Combinatorics, 9 (1): R6, doi:10.37236/1623, MR 1887087
- ^ a b c Zeng, Zhenbing; Chen, Liangyu (2011), "On the Heilbronn optimal configuration of seven points in the square", in Sturm, Thomas; Zengler, Christoph (eds.), Automated Deduction in Geometry: 7th International Workshop, ADG 2008, Shanghai, China, September 22-24, 2008, Revised Papers, Lecture Notes in Computer Science, vol. 6301, Heidelberg: Springer, pp. 196–224, doi:10.1007/978-3-642-21046-4_11, ISBN 978-3-642-21045-7, MR 2805061
- ^ Komlós, J.; Pintz, J.; Szemerédi, E. (1982), "A lower bound for Heilbronn's problem", Journal of the London Mathematical Society, 25 (1): 13–24, doi:10.1112/jlms/s2-25.1.13, MR 0645860
- ^ Bertram-Kretzberg, Claudia; Hofmeister, Thomas; Lefmann, Hanno (2000), "An algorithm for Heilbronn's problem", SIAM Journal on Computing, 30 (2): 383–390, doi:10.1137/S0097539798348870, hdl:2003/5313, MR 1769363
- ^ Komlós, J.; Pintz, J.; Szemerédi, E. (1981), "On Heilbronn's triangle problem", Journal of the London Mathematical Society, 24 (3): 385–396, doi:10.1112/jlms/s2-24.3.385, MR 0635870
- ^ Cohen, Alex; Pohoata, Cosmin; Zakharov, Dmitrii (2023), "A new upper bound for the Heilbronn triangle problem", arXiv:2305.18253 [math.CO]
- ^ Sloman, Leila (September 8, 2023), "The Biggest Smallest Triangle Just Got Smaller", Quanta, retrieved September 9, 2023
- ^ Dress, Andreas W. M.; Yang, Lu; Zeng, Zhenbing (1995), "Heilbronn problem for six points in a planar convex body", in Du, Ding-Zhu; Pardalos, Panos M. (eds.), Minimax and Applications, Nonconvex Optim. Appl., vol. 4, Kluwer Acad. Publ., Dordrecht, pp. 173–190, doi:10.1007/978-1-4613-3557-3_13, ISBN 978-1-4613-3559-7, MR 1376828
- ^ Yang, Lu; Zeng, Zhenbing (1995), "Heilbronn problem for seven points in a planar convex body", in Du, Ding-Zhu; Pardalos, Panos M. (eds.), Minimax and Applications, Nonconvex Optim. Appl., vol. 4, Kluwer Acad. Publ., Dordrecht, pp. 191–218, doi:10.1007/978-1-4613-3557-3_14, ISBN 978-1-4613-3559-7, MR 1376829
- ^ Jiang, Tao; Li, Ming; Vitányi, Paul (2002), "The average-case area of Heilbronn-type triangles", Random Structures & Algorithms, 20 (2): 206–219, arXiv:math/9902043, doi:10.1002/rsa.10024, MR 1884433, S2CID 2079746
- ^ Grimmett, G.; Janson, S. (2003), "On smallest triangles", Random Structures & Algorithms, 23 (2): 206–223, doi:10.1002/rsa.10092, S2CID 12272636
- ^ Brass, Peter (2005), "An upper bound for the -dimensional analogue of Heilbronn's triangle problem", SIAM Journal on Discrete Mathematics, 19 (1): 192–195, doi:10.1137/S0895480103435810, MR 2178353
- ^ Lefmann, Hanno (2008), "Distributions of points in dimensions and large -point simplices", Discrete & Computational Geometry, 40 (3): 401–413, doi:10.1007/s00454-007-9041-y, MR 2443292
- ^ Barequet, Gill; Naor, Jonathan (2006), "Large -D simplices in the -dimensional unit cube", Far East Journal of Applied Mathematics, 24 (3): 343–354, MR 2283483
- ^ Chazelle, Bernard (2001), The Discrepancy Method: Randomness and Complexity, Cambridge University Press, p. 266, ISBN 978-0-521-00357-5
External links
[edit]- Weisstein, Eric W., "Heilbronn Triangle Problem", MathWorld
- Erich's Packing Center, by Erich Friedman, including the best known solutions to the Heilbronn problem for small values of for squares, circles, equilateral triangles, and convex regions of variable shape but fixed area